Vector Calculus is also known as Multivariate Calculus or “Calculus 3”. Calculus 1 and 2 are Differential Calculus and Integral Calculus respectively (both are single variate).
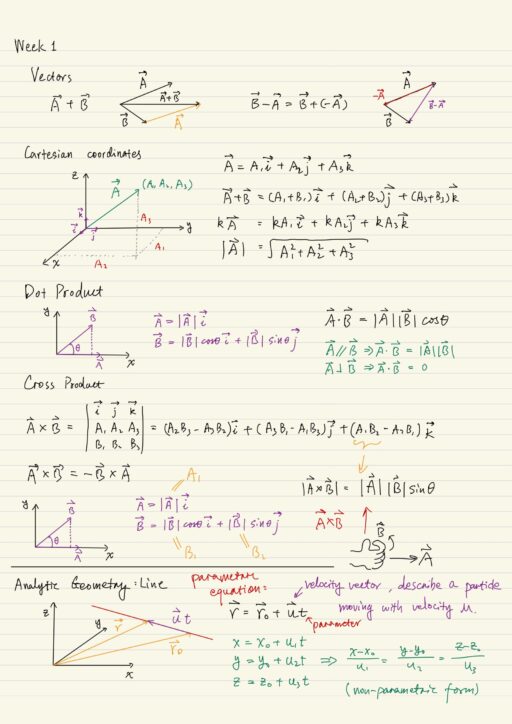
Vectors
A vector is a quantity that has a length associated with it, and a direction. It is not anchored in any particular spot. Besides, scalars are quantities that have only length, they are just numbers. Vectors follow a few rules:
- Addition of vectors is commutative, and associative.
- Multiplication of vectors by a scalar is distributive. and will not change the direction of the vectors, but just their length.
Cartesian Coordinates
In Cartesian coordinate system, you have 3 dimensions: x, y, z. There are 2 kind of vectors widely used:
| Position vector | Place the tail of a vector at the origin, and then locate a point in space.r = x i + y j + z k . |
| Displacement vector | The difference between 2 position vectors.r2 - r1 = (x2 - x1) i + (y2 - y1) j + (z2 - z1) k |
Dot Product
Dot product is also called scalar product, because the multiplication of 2 vectors results in a scalar. You are given vectors and you are free to choose any coordinate system you want.
A = a1 i + a2 j + a3 k
B = b1 i + b2 j + b3 k
A · B = a1 b1 + a2 b2 + a3 b3 Cross Product
Cross product is also called vector product. The way to remember what the vector is, is to use a three-by-three determinant. Use right hand rule to determine the direction of the product: suppose A × B, point your fingers in the direction of A, curl your fingers to the vector B, then the thumb is pointing to the direction of the product.
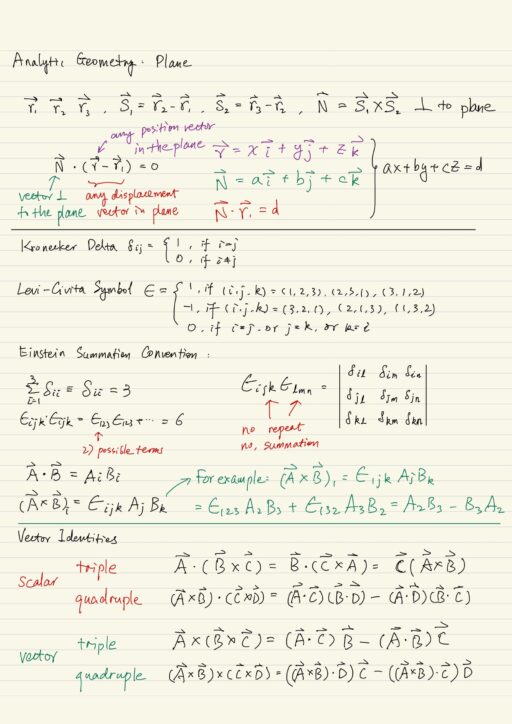
Analytic Geometry
We may use 2 points (position vectors) to define the parametric equation of a line, where r and r0 are both position vectors and u is velocity vector:
r = r0 + u t3 points (position vectors) could define a plane. We could get 2 displacement vectors from the 3 position vectors. Then the cross product of the 2 displacement vectors are perpendicular the the plane. The dot product of this perpendicular vector to the plane and any vector that lies in the plane is zero.
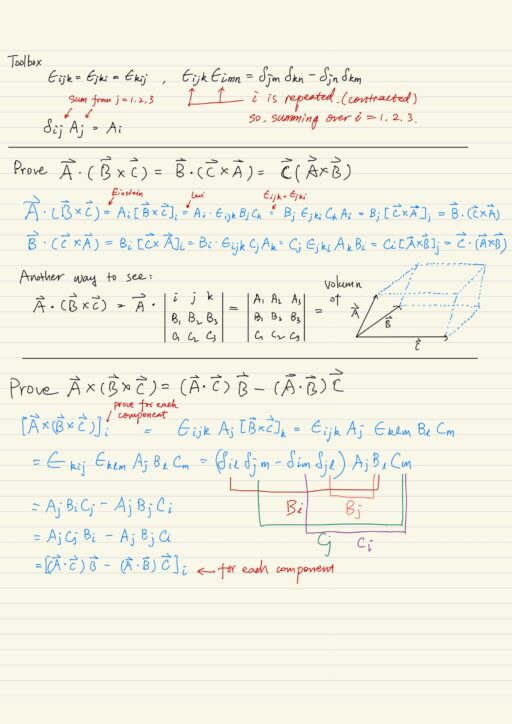
Vector Identities
Kronecker-Delta, Levi-Civita symbol and Einstein Summation Conventions are used to prove some vector identities. There are 2 types of vector identities:
| Scalar vector identities | Left hand side is scalar. Right hand side is scalar. |
| Vector vector identities | Left hand side is vector. Right hand side is vector. |
Scalar and Vector Fields
We are interested in the phenomenon that vary in space, and vary in time, and we represent those phenomenon using the concept of fields. A position vector r is used to locate where you are in the space. A variable t is used to locate where you are in time.
Then we could define a scalar field, for example: temperature:
T(r, t) = T(x, y, z, t)Or a vector field, for example velocity:
u(r, t) = u1(x, y, z, t) i + u2(x, y, z, t) j + u3(x, y, z, t) kThese fields are usually found through a governing equation, which are called partial differential equations.
My Certificate
For more on Vector Calculus: Basics, please refer to the wonderful course here https://www.coursera.org/learn/vector-calculus-engineers
Related Quick Recap
I am Kesler Zhu, thank you for visiting my website. Check out more course reviews at https://KZHU.ai