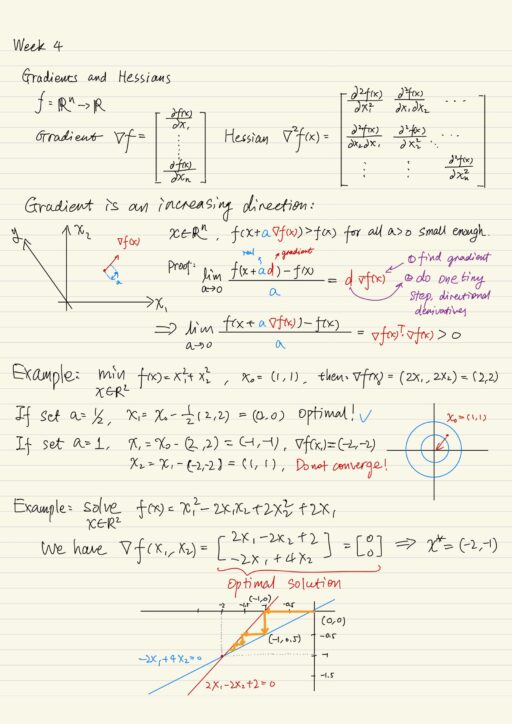
Non-Linear Programs When visualizing a linear program, its feasible region looks like a polygon. Because the objective function is also linear, the optimal solution is on the boundary or corner of the region. But a non-linear program is quite different, its feasible region may be in any shape, moreover the optimal solution may not exist…